A short introduction.
CANopen is a high-level protocol originally designed for motion-oriented machine control systems. While CANopen was initially designed for motion control, it is now used in a wide variety of applications. CANopen operates on a CANbus network.
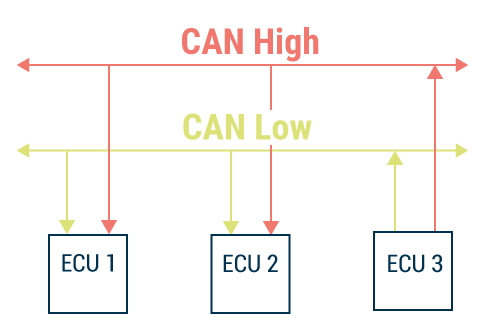
CANbus (Controller Area Network) is a vehicle bus standard that allows devices such as motor controllers, sensors, and other ECUs (electronic control units) to communicate with each other. CANbus acts as the nervous system of the vehicle, and every vehicle today is equipped with CANbus.