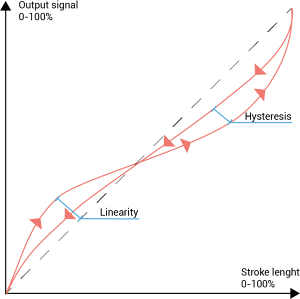
Linearity Error
Linearity, or non-linearity, is the deviation between the theoretically ideal straight line and the actual output signal.
Linearity can be expressed in absolute terms, e.g., millimeters [mm] or milliamps [mA], or relative to the entire full scale [FS], e.g., 0.05%.